드론 비행 제어 시스템 구조에 대해 알아보겠습니다. 드론은 단순한 무선 조종 장난감을 넘어, 촬영·측량·물류·농업·재난 대응 등 다양한 산업 분야에서 활용되고 있습니다. 이러한 드론 기술의 중심에는 비행 제어 시스템(Flight Control System) 이 존재합니다. 비행 제어 시스템은 드론이 공중에서 안정적으로 자세를 유지하고, 사용자의 명령에 따라 정확하게 움직일 수 있도록 하는 핵심 공학 기술입니다.
드론 비행 제어 시스템 개요
드론 비행 제어 시스템(Flight Control System, FCS)은 센서, 프로세서, 제어 알고리즘으로 구성되어 자세 안정화와 경로 추종을 수행합니다. 주요 구성 요소로는 IMU(Inertial Measurement Unit), GPS, 비행 컨트롤러(Flight Controller, FC)가 포함되며, PX4나 ArduPilot 같은 오픈소스 소프트웨어가 널리 사용됩니다. 2026년 기준 고성능 FC는 F7/H7 프로세서(216MHz 이상)를 탑재하여 실시간 처리 속도를 32kHz 이상 지원합니다.
- 드론의 자세 안정화
- 외부 환경 변화에 대한 즉각적인 보정
- 사용자의 조종 명령을 정확하게 반영
- 자동 비행 및 경로 제어 지원
비행 제어 시스템의 기본 구성 요소
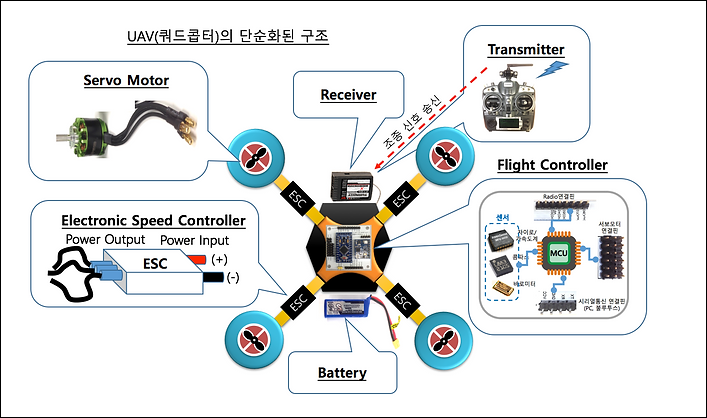
드론의 비행 제어 시스템은 단일 장치가 아니라, 여러 하드웨어와 센서가 유기적으로 결합된 복합 제어 구조로 이루어져 있습니다. 각 구성 요소는 독립적으로 동작하는 것이 아니라, 실시간으로 데이터를 주고받으며 드론의 자세 안정과 이동 제어를 동시에 수행합니다.특히 비행 중에는 수 밀리초 단위로 자세 변화가 발생하기 때문에, 센서의 정확도와 제어 장치 간의 데이터 처리 속도가 비행 안정성을 직접적으로 좌우합니다.
| 구성 요소 | 역할 | 기술적 의미 |
|---|---|---|
| 비행 컨트롤러(FC) | 전체 제어 연산 수행 | 드론의 중앙 제어 장치 |
| IMU 센서 | 자세 및 회전 정보 측정 | 안정성 확보의 핵심 |
| 자이로 센서 | 각속도 측정 | 회전 제어 및 균형 유지 |
| 가속도 센서 | 가속도 및 기울기 측정 | 자세 변화 감지 |
| ESC | 모터 속도 제어 | 비행 동작의 직접 제어 |
| 모터 및 프로펠러 | 실제 추력 발생 | 상승·하강·회전 구현 |
IMU 센서와 자세 제어 원리
IMU(Inertial Measurement Unit)는 드론 비행 제어 시스템에서 가장 핵심적인 센서 모듈로 평가됩니다. IMU는 드론이 현재 어떤 자세로 비행하고 있는지, 얼마나 기울어졌는지, 어떤 방향으로 회전하고 있는지를 실시간으로 감지하여 비행 컨트롤러에 전달합니다. 비행 중 드론이 안정적으로 균형을 유지할 수 있는 이유는 대부분 IMU 센서에서 제공하는 데이터에 기반하고 있습니다.
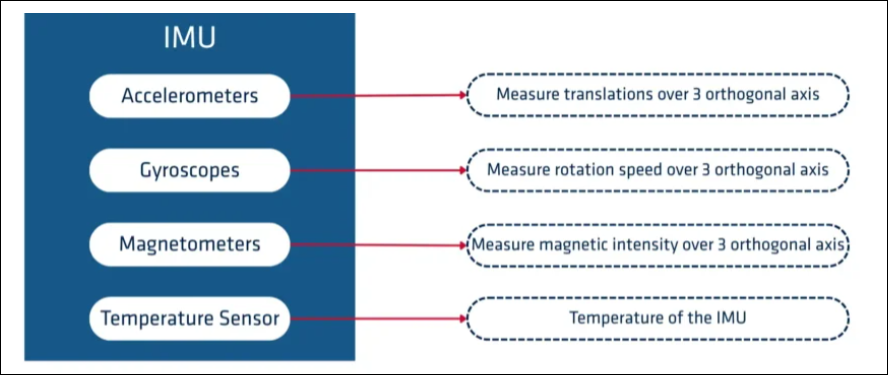
1. IMU 센서의 구성과 역할
- 자이로 센서(Gyroscope)
드론의 회전 속도(각속도)를 측정합니다.
드론이 좌우로 회전하거나 기체가 기울어질 때 발생하는 회전 변화를 매우 빠르게 감지할 수 있어, 급격한 자세 변화에 즉각적으로 대응하는 데 핵심적인 역할을 합니다. - 가속도 센서(Accelerometer)
드론의 가속도와 중력 방향을 측정합니다.
이를 통해 드론이 어느 방향으로 기울어져 있는지, 상승 또는 하강 중인지 판단할 수 있습니다.
2. 센서 데이터의 한계와 보완 필요성
각 센서는 장점과 한계를 동시에 가지고 있습니다. 아래와 같은 한계 때문에 단일 센서 데이터만으로는 안정적인 자세 제어가 어렵습니다.
따라서 실제 드론 비행 제어에서는 여러 센서 데이터를 결합해 사용하는 센서 융합(Sensor Fusion) 기법이 필수적으로 적용됩니다.
- 자이로 센서
빠른 반응 속도를 가지지만, 시간이 지남에 따라 오차가 누적되는 드리프트 현상이 발생할 수 있습니다. - 가속도 센서
장기적인 자세 판단에는 유리하지만, 진동이나 외부 충격에 민감해 노이즈가 발생하기 쉽습니다.
3. IMU 성능이 드론 비행에 미치는 영향
IMU 성능이 우수할수록 다음과 같은 효과를 기대할 수 있습니다. 반대로 IMU 데이터가 불안정할 경우, 드론은 미세한 진동이나 원치 않는 회전을 반복하게 되어 비행 품질이 크게 저하됩니다.
- 비행 중 흔들림 감소
- 급격한 조종 입력에도 안정적인 반응
- 자동 비행 및 정밀 제어 정확도 향상
- 고속 비행 시 자세 유지 능력 강화
PID 제어 알고리즘
드론 비행에서 PID 제어 알고리즘은 단순한 제어 기법을 넘어, 기체 안정성을 실질적으로 보장하는 핵심 메커니즘이라 할 수 있습니다. 이론적으로는 비교적 오래된 제어 방식이지만, 실제 비행 환경에서는 계산 효율성과 예측 가능성 측면에서 여전히 강력한 장점을 유지하고 있습니다. 특히 드론은 바람, 기체 무게 변화, 모터 출력 불균형 등 외란이 빈번하게 발생하는 시스템이기 때문에, 이상적인 수학 모델만으로는 안정적인 제어가 어렵습니다. 이러한 현실적인 제약 속에서 PID 제어는 복잡한 연산 없이도 즉각적인 보정이 가능하다는 점에서, 상용·교육·연구용 드론 전반에 걸쳐 널리 채택되고 있습니다.
| 구분 | 제어 요소 | 핵심 역할 | 드론 비행에서의 영향 |
|---|---|---|---|
| P (비례 제어) | 현재 오차에 비례하여 출력 조절 | 즉각적인 반응 제공 | 기체 기울어짐에 빠르게 대응하지만, 과도하면 진동 발생 |
| I (적분 제어) | 누적된 오차를 보정 | 지속적인 오차 제거 | 미세한 기울기나 편향을 장기적으로 보정 |
| D (미분 제어) | 오차 변화율을 기반으로 예측 | 급격한 변화 억제 | 급정지·급회전 시 흔들림 감소 |
| PID 통합 | P·I·D 요소 결합 | 안정성과 반응성 균형 | 실제 비행에서 가장 현실적인 제어 성능 구현 |
PID 제어의 핵심은 세 요소 중 어느 하나가 아니라, 각 요소의 균형 잡힌 조합과 파라미터 튜닝에 있습니다. 실제로 드론 제어에서 문제가 발생하는 경우, 알고리즘 자체보다는 P·I·D 값이 기체 특성과 맞지 않는 경우가 대부분입니다. 이러한 이유로 PID 제어는 고급 제어 기법이 적용된 최신 드론에서도 기본 제어 계층(Base Control Layer)으로 유지되는 경우가 많으며, 상위 알고리즘이 작동하지 않더라도 최소한의 비행 안정성을 확보하는 안전장치 역할을 수행합니다.
수동 비행과 자동 비행 제어의 차이
드론 비행 제어 시스템은 크게 수동 비행과 자동 비행으로 구분됩니다. 자동 비행에서는 GPS, 고도 센서, 비전 센서 등이 추가되어 정밀한 위치 제어가 가능합니다.
| 구분 | 특징 | 활용 분야 |
|---|---|---|
| 수동 비행 | 조종자의 입력 기반 제어 | 취미·촬영 |
| 자동 비행 | 센서 및 경로 기반 제어 | 측량·농업·물류 |
| 반자동 비행 | 보조 안정화 기능 포함 | 산업·교육 |
드론 비행 제어 시스템은 센서, 제어 알고리즘, 하드웨어가 유기적으로 결합된 고난도 공학 기술입니다.
안정적인 비행을 위해서는 정밀한 센서 데이터 처리와 효율적인 제어 로직이 필수적이며,
향후 자율 비행 기술의 발전은 드론 산업 전반의 확장을 이끌 핵심 요소가 될 것입니다.